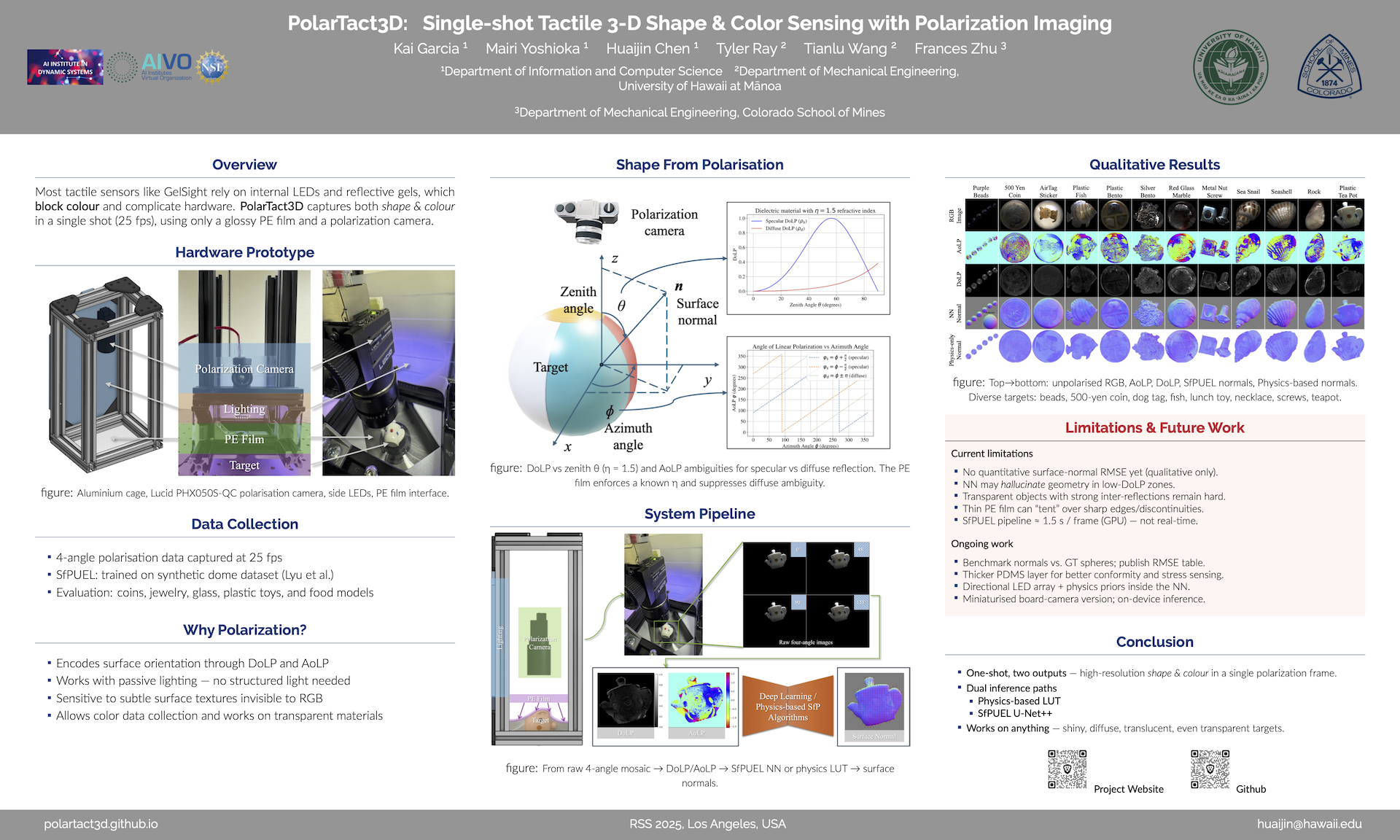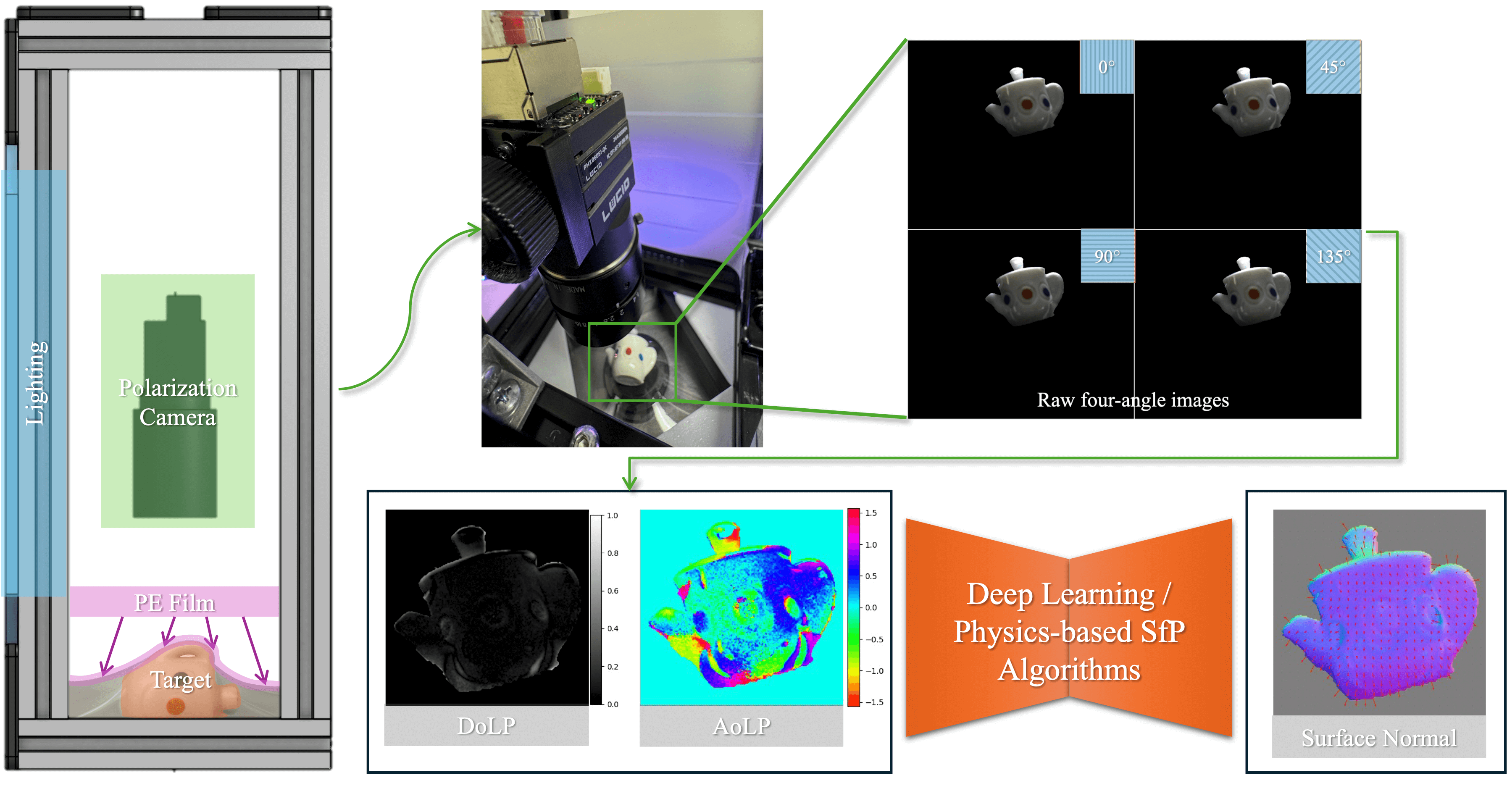
Vision-based tactile sensors are essential for robotic applications such as grasping and physical interaction. We propose a low-cost, polarization-imaging-based tactile sensor that captures both shape and color information in a single shot.
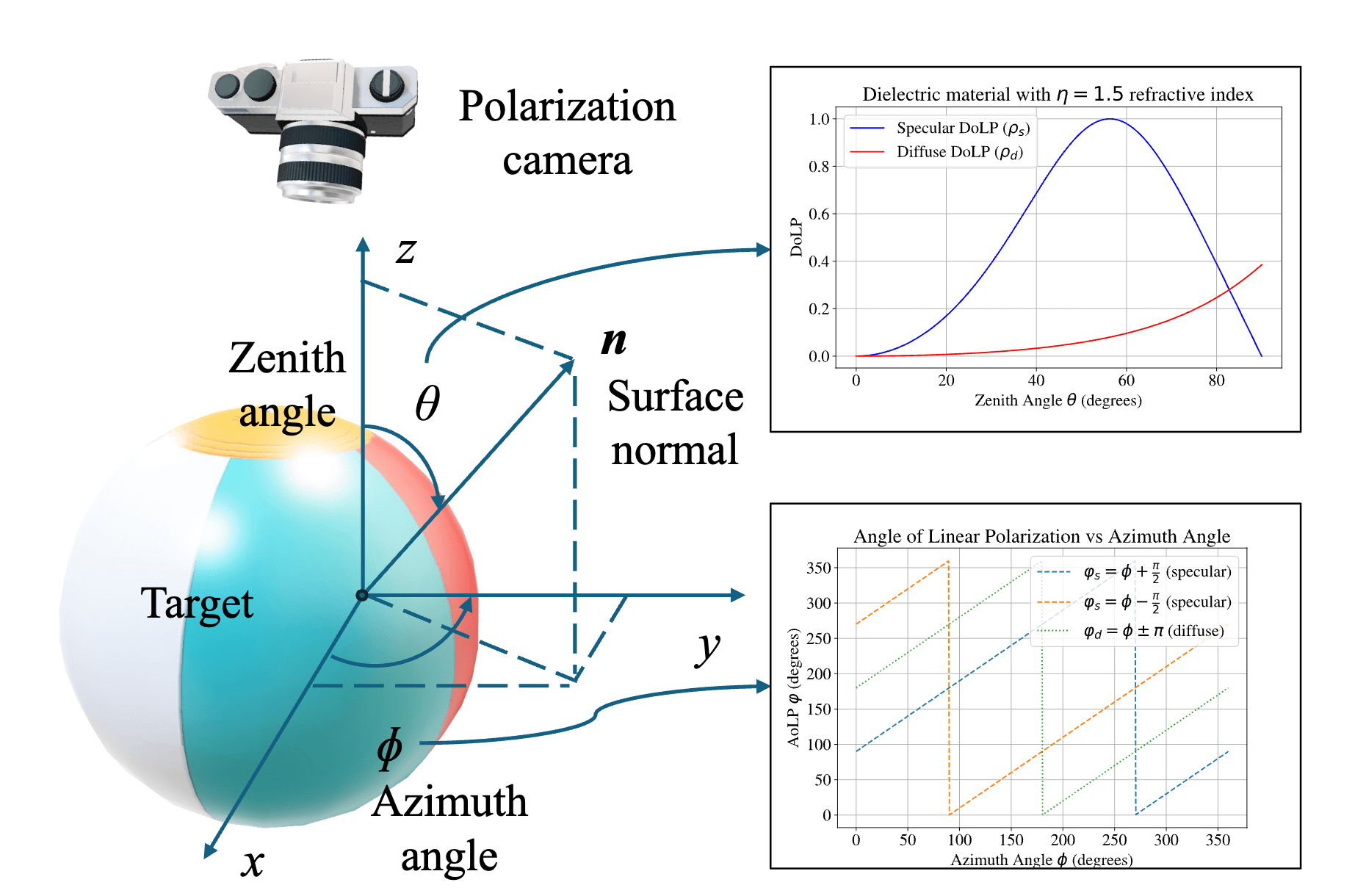
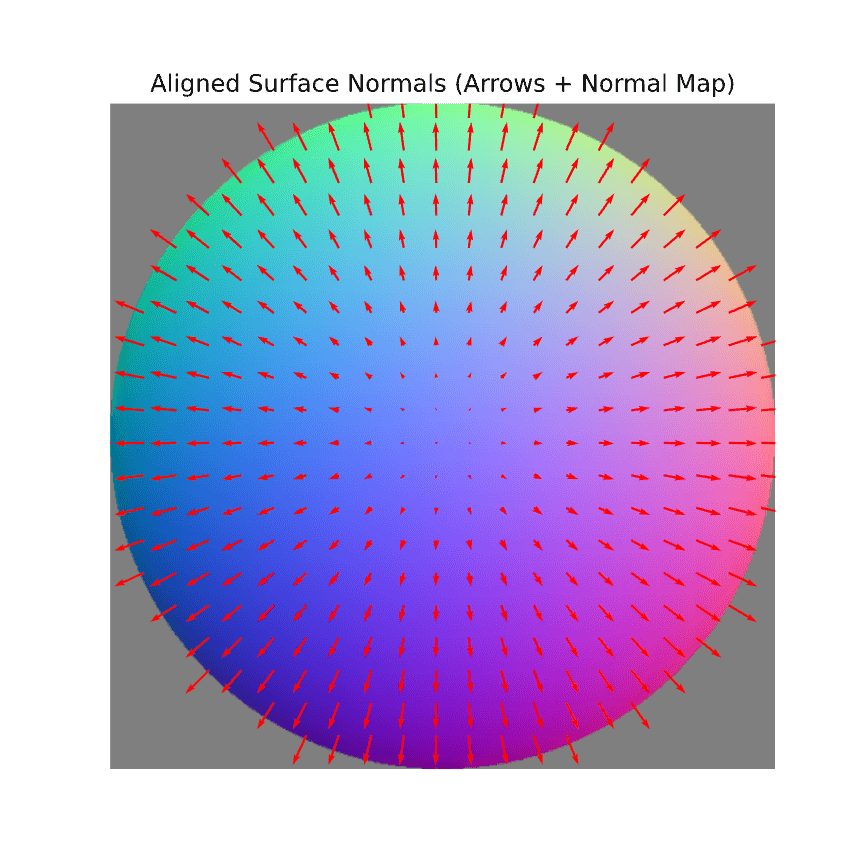
Unlike photometric-stereo-based solutions like GelSight, which require precise internal illumination and cannot reliably capture color due to the reflective coating required for surface reconstruction, our method leverages the Angle of Linear Polarization (AoLP) and Degree of Linear Polarization (DoLP) to encode 3D geometry.
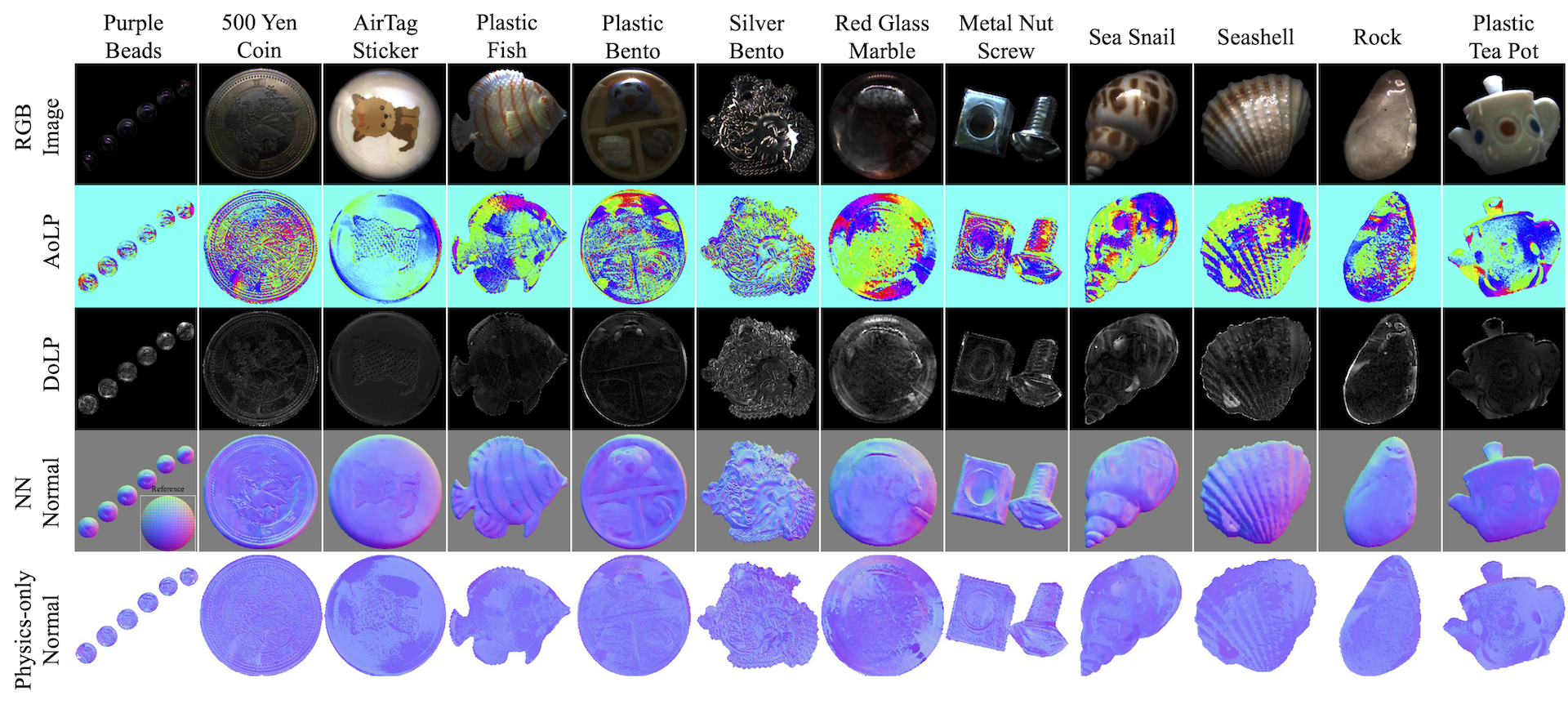
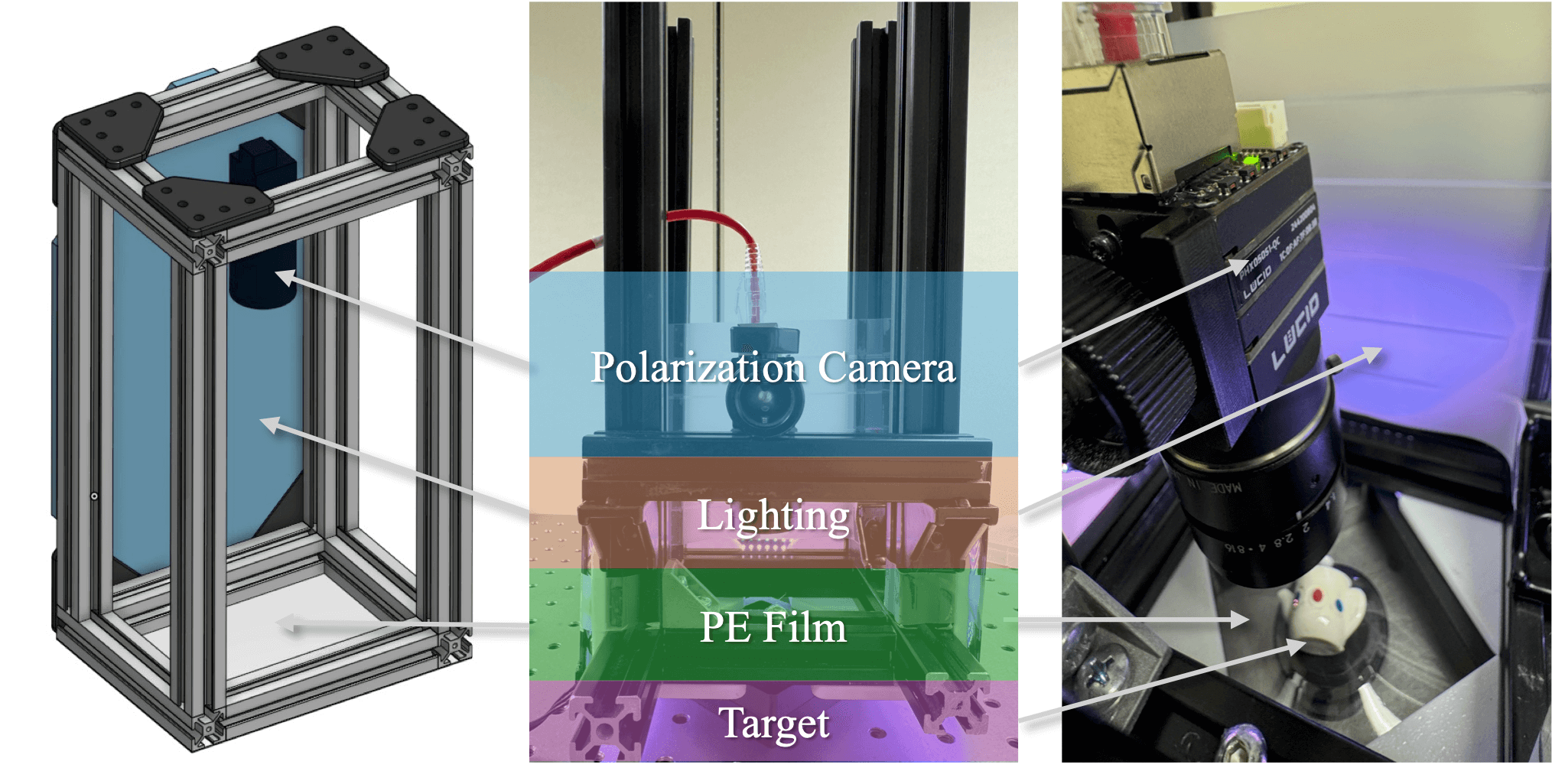
This approach enables robust shape reconstruction, even on transparent or specular targets. The sensor is constructed using commercial transparent polyethylene (PE) film and an off-the-shelf polarization camera, making it simple and inexpensive to build.
We demonstrate the effectiveness of our design through real-world experiments on various contact surface scenarios.
@inproceedings{garcia2025polartact3d,
author = {Kai Garcia and Mairi Yoshioka and Tyler Ray and Tianlu Wang and Frances Zhu and Huaijin Chen },
title = {{PolarTact3D}: Single-shot Tactile 3-D Shape and Color Sensing with Polarization Imaging},
booktitle = {Workshop on Navigating Contact Dynamics in Robotics},
series = {Robotics: Science and Systems (RSS)},
year = {2025},
address = {Los Angeles, CA},
pages = {1-1},
note = {Best Paper Award (3rd Place)}
}